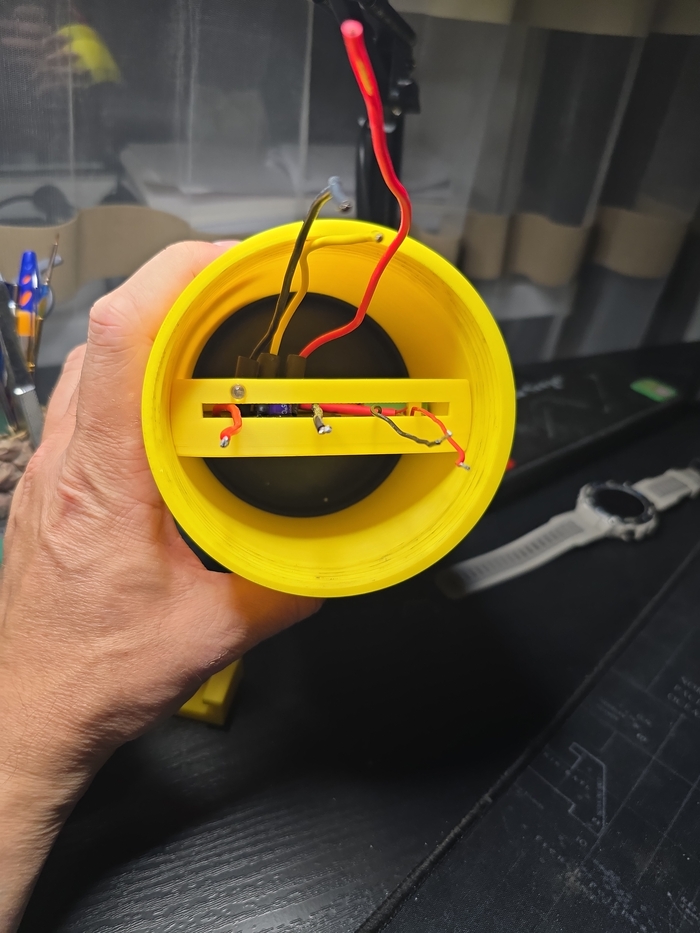
Делаю отдельный герметичный отсек, через который в корпус заходят кабели и питание. Здесь будет главный выключатель, кабельные вводы и переход в основной отсек с электроникой. Небольшой узел, но именно с него начинается вся электрика подводного робота.
Пора заглянуть внутрь корпуса. Здесь будет жить вся электроника: питание, управление, камеры, защита и связь. Главное — чтобы после погружения это всё не превратилось в аквариум.)))
Устанавливаю фары на подводный гусеничный робот. Подсветка нужна для работы камеры, движения у дна и осмотра объектов в условиях слабой видимости. На первых испытаниях проверю, насколько хватает света в воде и как он влияет на качество изображения.
Продолжаю работу над подводным гусеничным роботом «ПРОЕКТ 82».
На этот раз завершил изготовление и сборку герметичного иллюминатора для камеры. Выполнено уплотнение, установлено акриловое стекло и подготовлен узел к испытаниям на герметичность.
Иллюминатор — одна из самых важных деталей подводного аппарата. Любая ошибка в конструкции или уплотнении может привести к затоплению оборудования, поэтому этому узлу уделяю особое внимание.
Следующий этап — испытания корпуса и проверка герметичности всех соединений.
ПРОЕКТ 82. Итоги первой и второй недели строительства подводного робота.
За две недели удалось пройти путь от идеи и первых эскизов до реальных деталей будущего аппарата. За это время была разработана концепция подводного гусеничного робота, выполнена компоновка оборудования, усилен корпус, изготовлены элементы герметичных крышек и начата работа над системой наблюдения.
Основная цель проекта — создание собственного подводного робота для исследования водоёмов, съёмки под водой и выполнения различных инженерных задач. Все работы выполняются самостоятельно в мастерской: проектирование, металлообработка, изготовление корпусов, электроника и испытания.
В ближайшие недели планируется завершение корпуса, изготовление башни с поворотной камерой, проверка герметичности и первые погружения в воду.
Все этапы строительства публикуются на канале «ПРОЕКТ 82».
Буду рад вопросам, советам и конструктивной критике.
День добрый! В предыдущем посте "Водомет движущий на SUP. Начало". Не ожидал увидеть столько увлеченных ребят, которым действительно интересно данная тема.
Что получилось в конце. Изначально идея была засунуть и аккумулятор в водяную часть, но это влияло на размер, да и смена аккумуляторов была не сильно удобна, особенно когда все мокрое.
В предыдущем забыл добавить видео, почему отказались от идеи с магнитной муфтой:
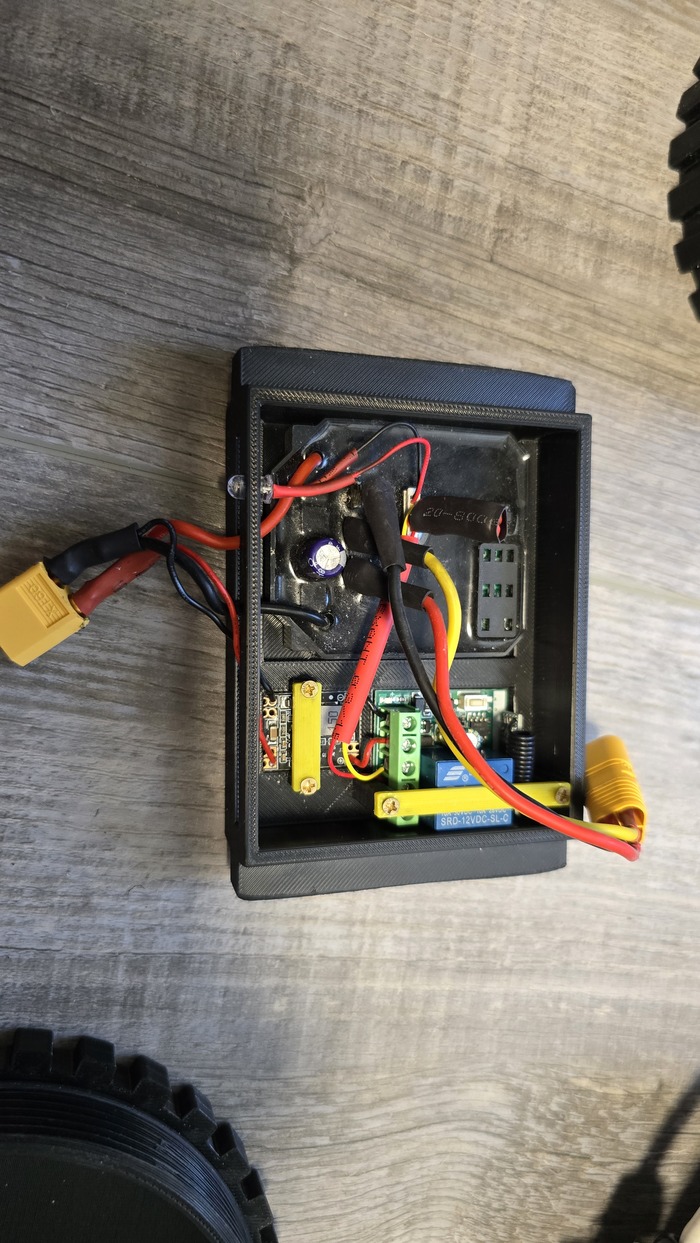
В электрической части я не силен и решение было собрать воедино то, чем располагает китайский магазин. Основной задачей было, не используя ардуино, подключить бесщёточный электромотор к аккумуляторной батарее 21В от шуруповерта. Также хотелось, чтобы "вкл-выкл" был на дистанционном пульте.
Первые варианты аккумуляторного-электронного отсека. Гладкие стенки не удобно было крутить мокрыми руками, потому добавил ребер.
Порывшись на алике, обнаружил релюху работающую с пульта по блютузу. Там же заказал плату управления бесщёточными моторами (ремкомплект с какого-то китайского шуруповерта). Дождавшись посылки, стал разбираться: Батарея 21В(мотору этого питания с головой для работы мотора), а вот питание управления реле всего 5В, да и ток пропускания реле 10А и чтобы обезопасить реле от перегорания, подвесил на плату управления мотора. Питание на реле подавалось через отдельную понижающую плату с 21В до 5В. CADирую герметичный корпус на резиновых кольцах для уплотнения, кабель прокладываю через гермовводы PG15, резьбу под них закладывал в модель.
Планетарный редуктор и мотор в напечатанном корпусе.
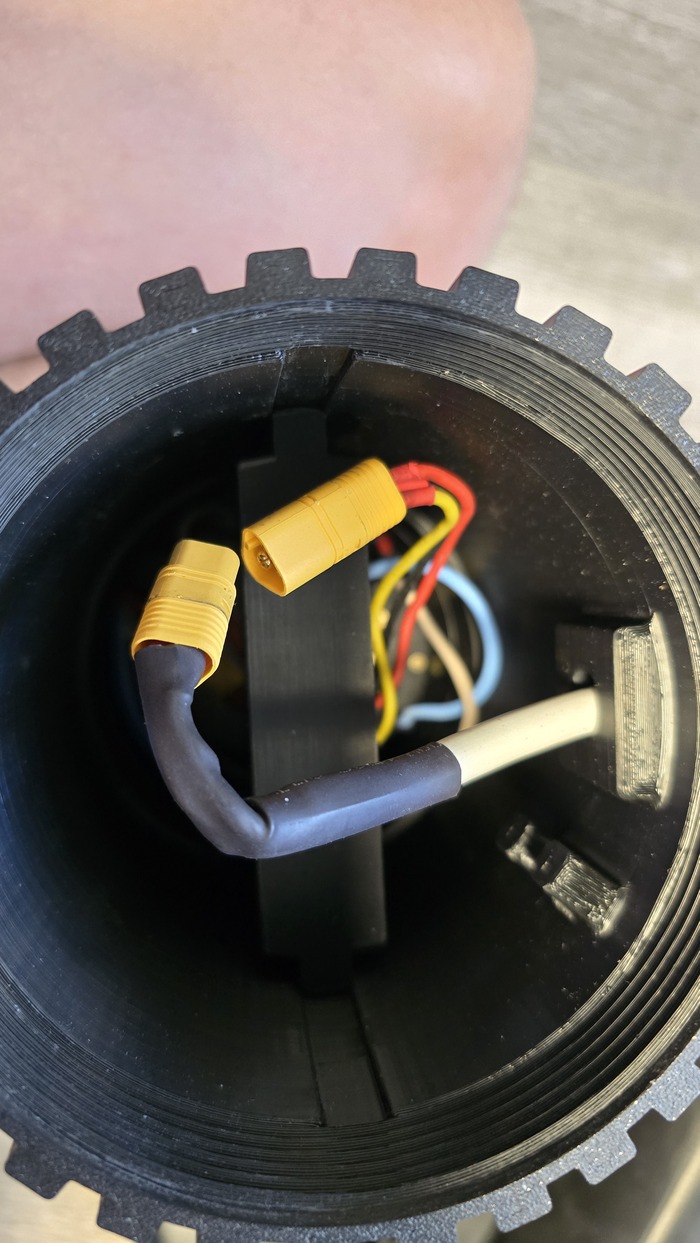
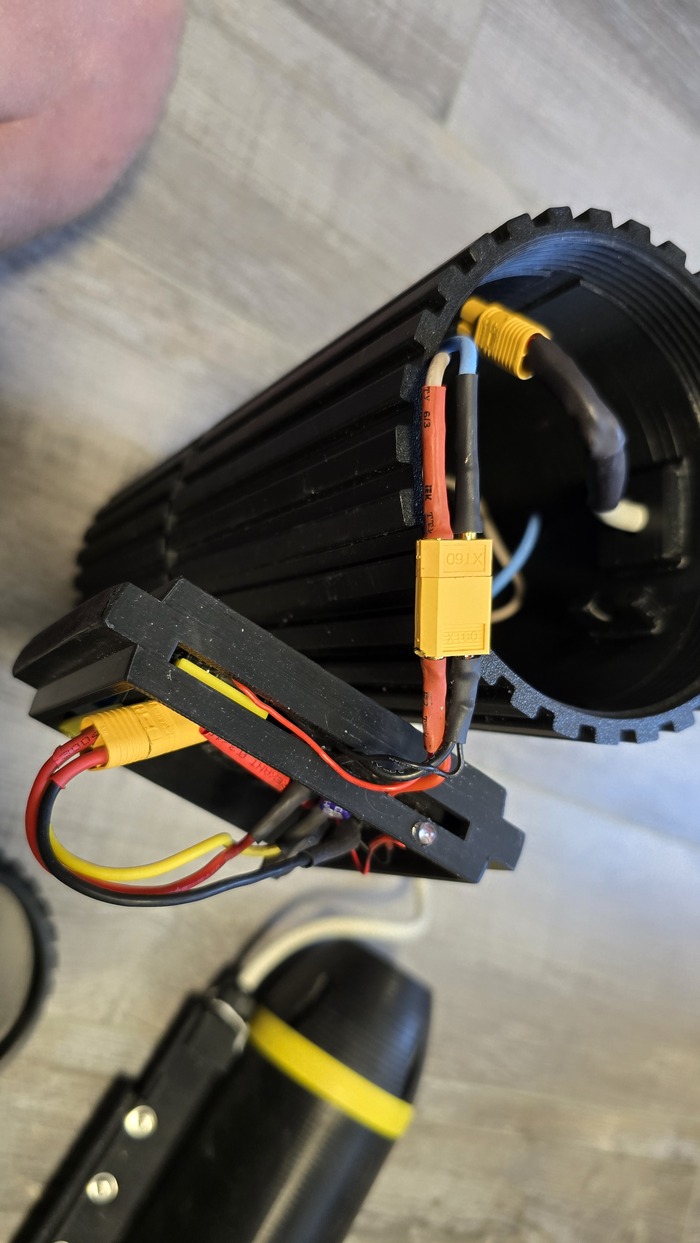
Коннектор МТ30
2х жильный коннектор ХТ60
Управляющий блок
Продумал ответную часть для аккумуляторных батарей от компании ПИТ(не рекламы ради, может просто исходники кому нужны будут). Приготовил медные контакты для подключения батарей. Все спаял воедино. Чтобы проще все было собирать кабеля соединял коннекторами MT30 (3х-жильные, 15А).
На открытой же воде скорость составила 7-8 км/ч. На двух базовых аккумуляторах от шурика PIT время катания на данный момент составляет ~40 минут. Очень классно дополняет, когда разогнался на весле, а потом включил моторчик.
Также начал, работать над проектом моторчика с открытым типом винта, дальнейшие посты будут уже о нем.
P.S. За комментарии в видео сильно не пинайте.
STL файлы выложу на makerworld, ссылку закреплю в комментариях.
В этом видео продолжаю разработку подводного робота. Изготавливаю и собираю поворотную камеру-разведчик, предназначенную для наблюдения, навигации и подводной съёмки.
Камера будет установлена в герметичной башне с круговыми иллюминаторами, что позволит вести наблюдение в разных направлениях во время движения робота по дну водоёма.
ПРОЕКТ 82 — инженерный проект по созданию гусеничного подводного робота для исследования водоёмов, инспекционных работ и подводной съёмки.
В этом видео изготавливаю герметичный иллюминатор для подводного робота PROJECT 82. Иллюминатор предназначен для защиты камеры от внешнего давления воды и обеспечения качественной подводной съёмки.
Показываю процесс токарной обработки деталей, изготовление фланцев, подготовку посадочных мест под акриловое стекло и сборку конструкции.
PROJECT 82 — это инженерный проект по разработке и созданию гусеничного подводного робота для исследования водоёмов, инспекционных работ и подводной съёмки. На канале публикуются этапы проектирования, изготовления, сборки и испытаний аппарата.